Run
총 16프레임
점프 높이 설정
- 0프레임에 root translate 키잉
- 8프레임에 root 높이 +200으로 설정 키잉
점프 도약 설정


- pelvis 아래로 내리고 각도는 위를 향하도록
- 앞발과 뒷발 모으기
- head는 로컬 y 방향으로 조금 내리기
- 16프레임에 0프레임의 도약 포즈 복붙
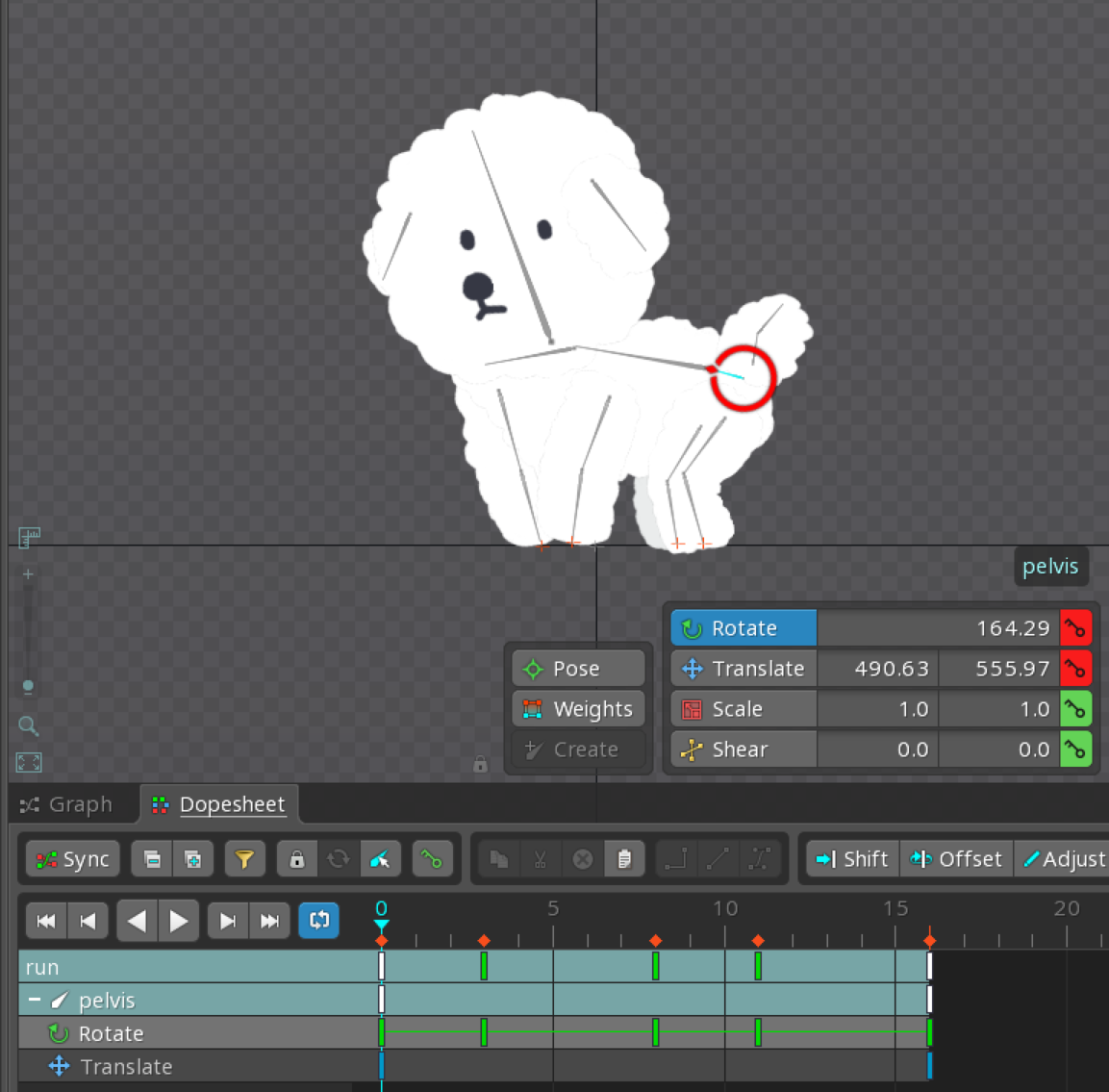
pelvis 설정
- 0프레임, 16프레임 translate 키잉
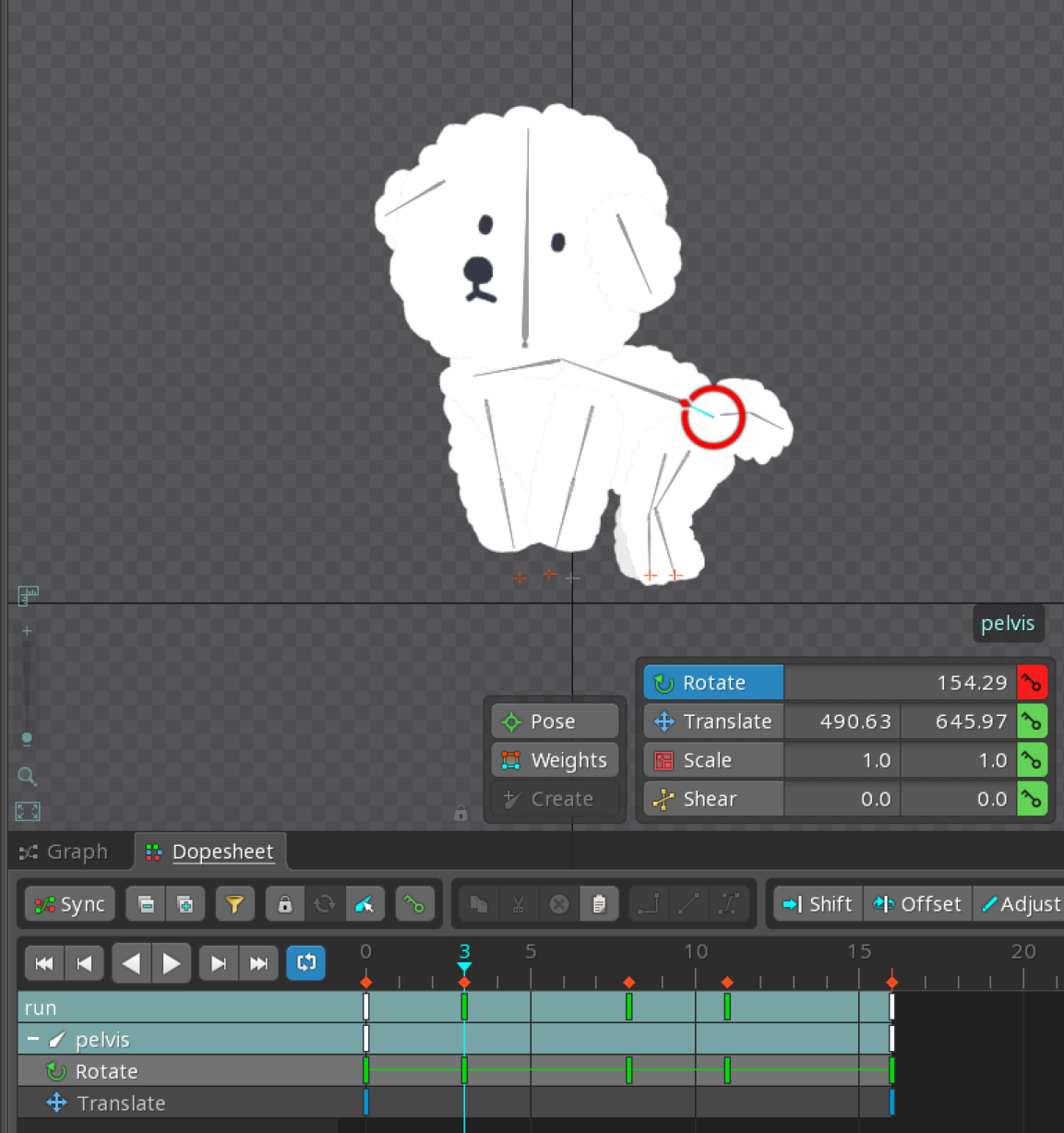
- 3프레임에 위를 10도 정도 향하도록 회전 (-10도 하면 됨)
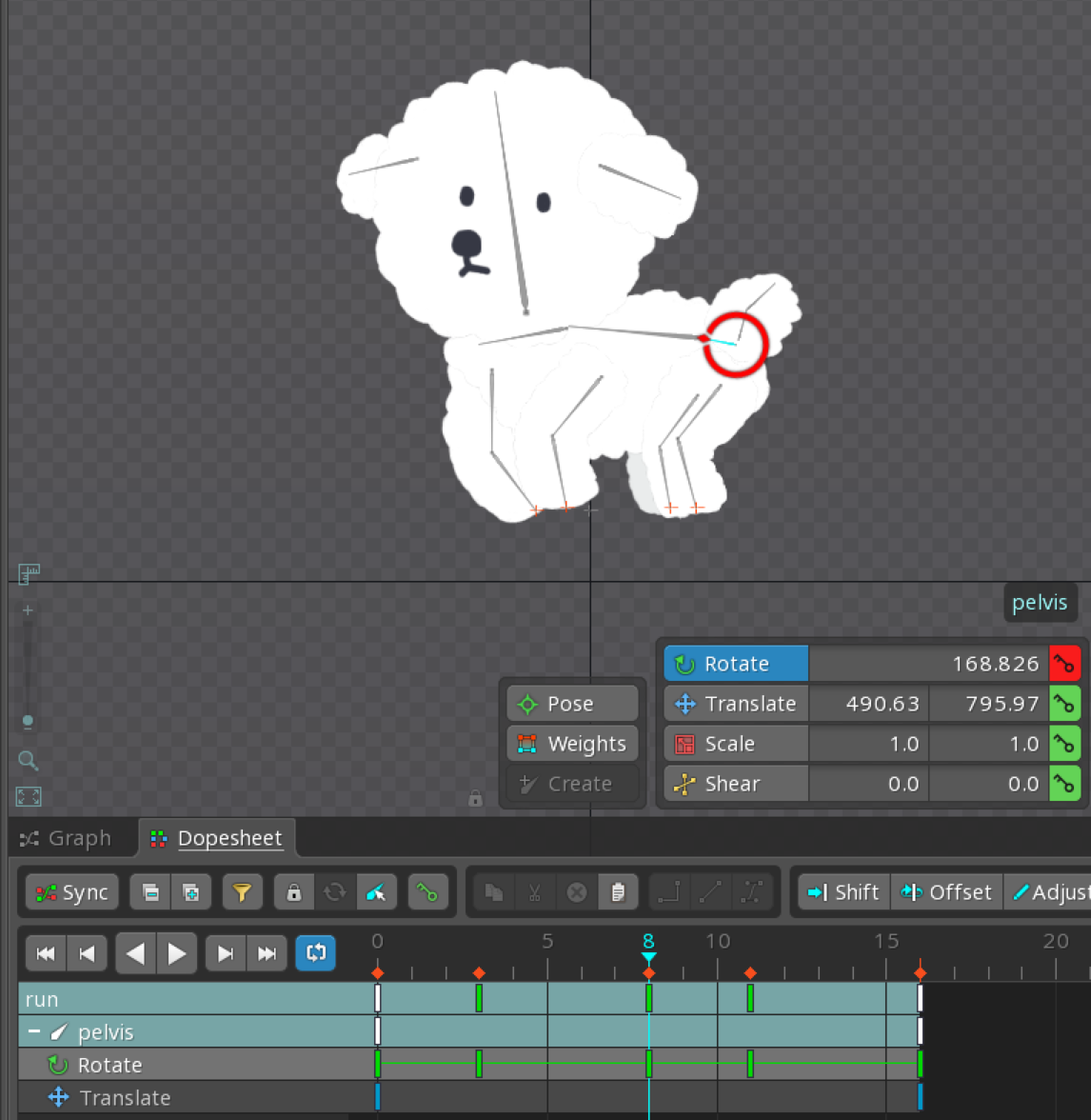
- 8프레임에 0프레임과 비슷하지만 조금 위를 향하도록 설정 (+4, 5도)
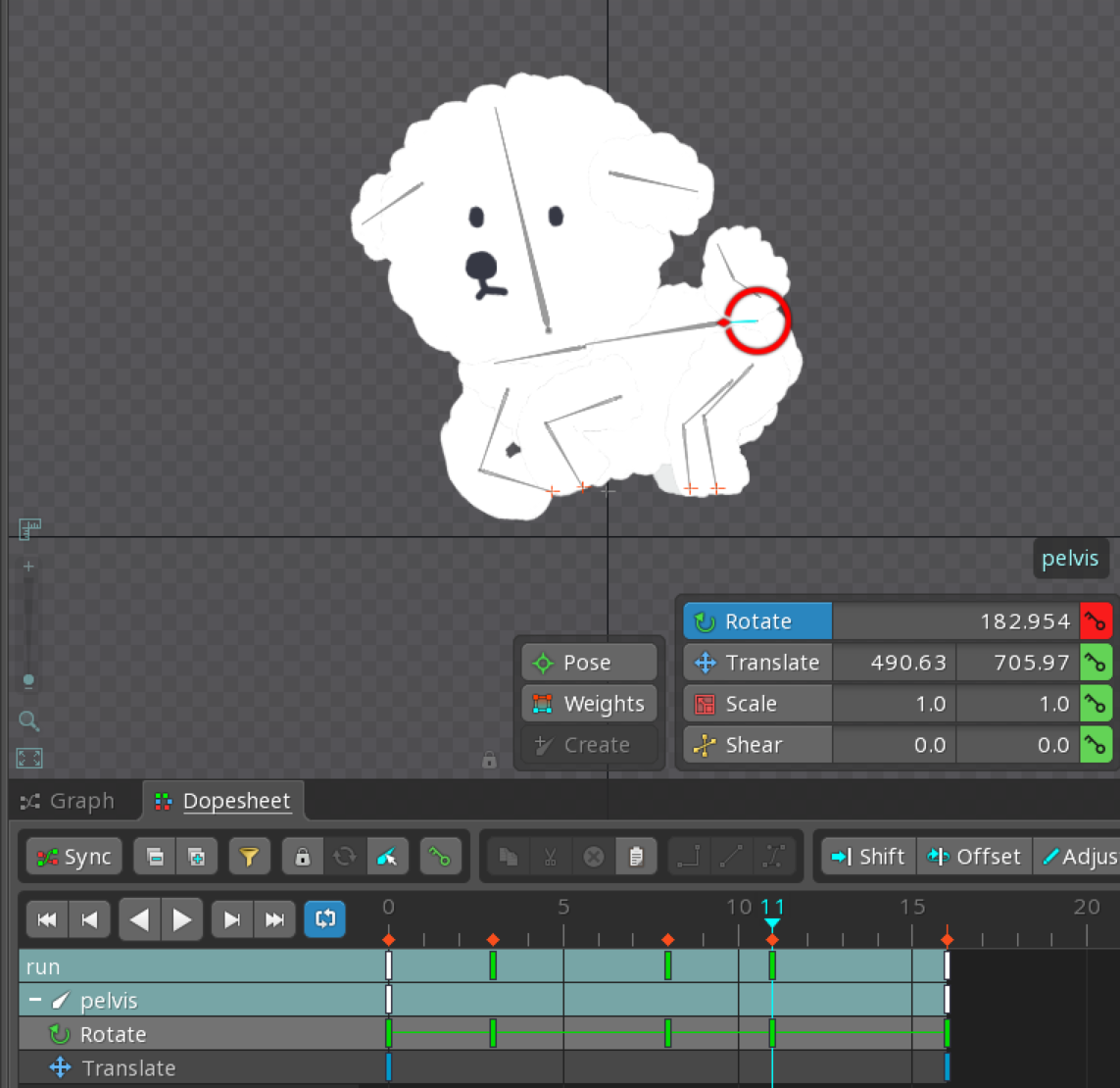
- 11프레임에 0프레임보다 조금 아래를 보도록 (+18도)
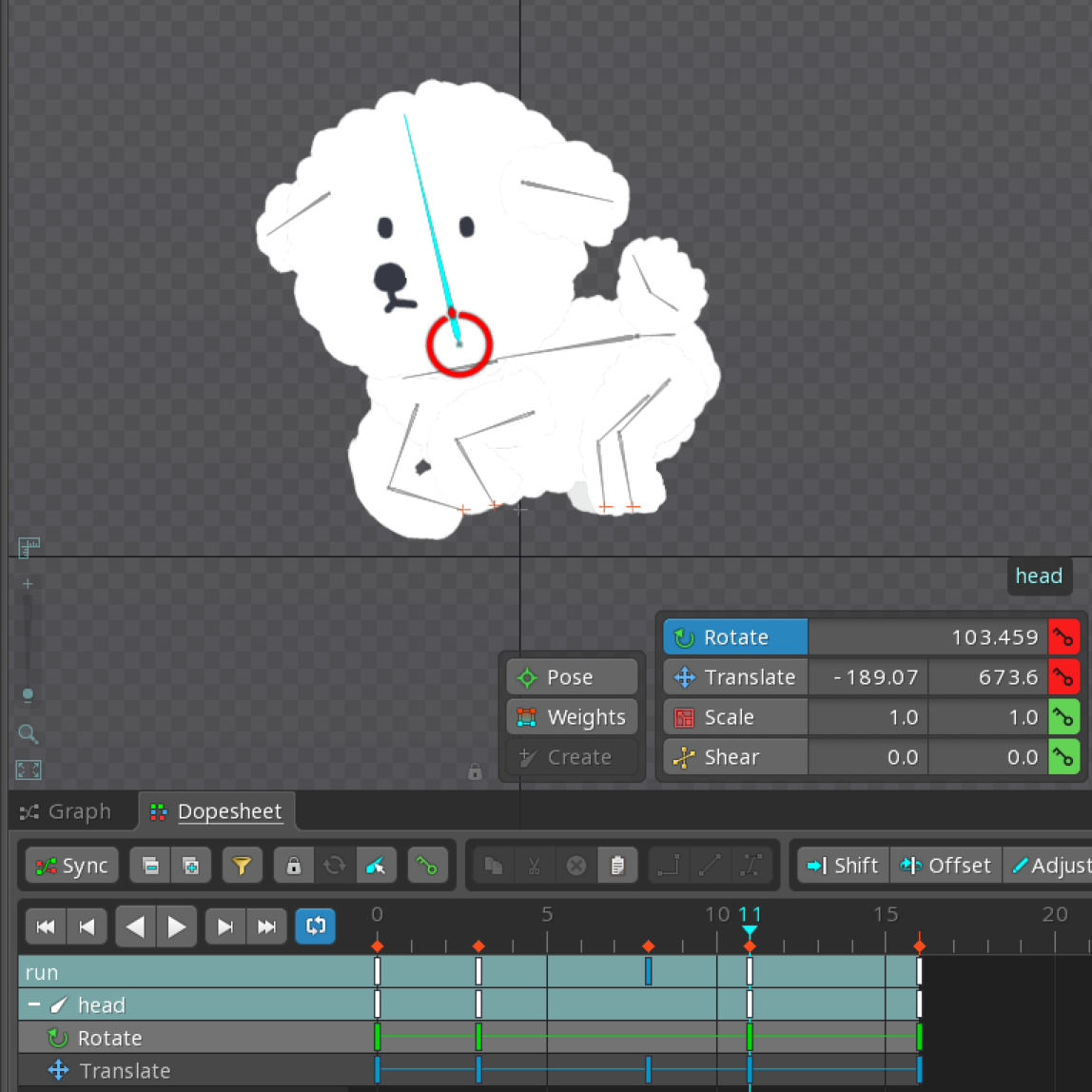
head 설정
- 0프레임, 16프레임 translate 키잉
- 3프레임 고개 조금 뒤로 젖히면서 rotate (26), translate는 조금 앞으로 이동

- 8프레임 고개 translate 조금 더 앞으로 이동 (20)

- 11프레임 고개 조금 아래로 rotate (14), translate 3프레임 위치 그대로 키잉
ear 설정
- 0프레임, 2프레임 16프레임 키잉
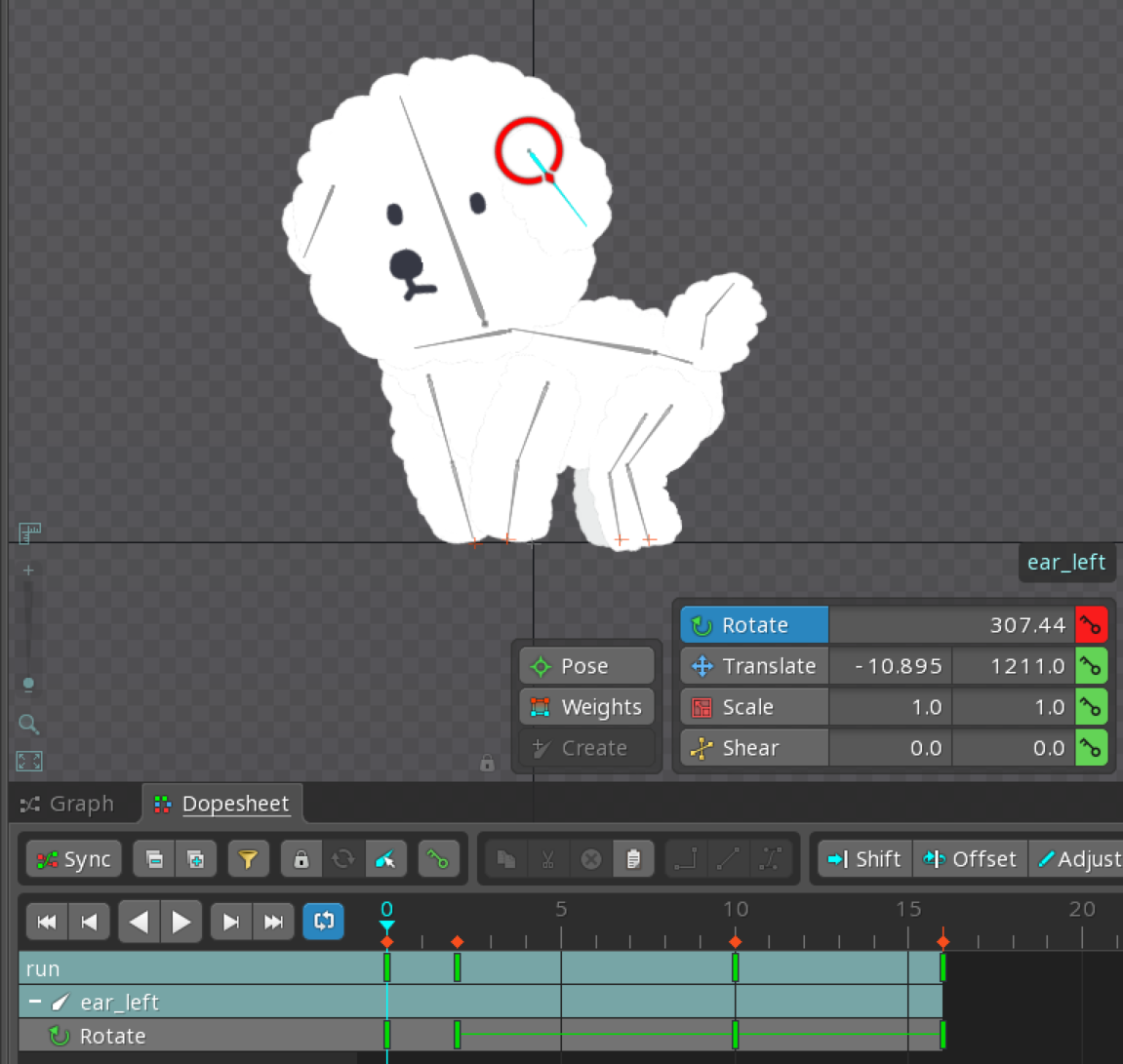
- 10프레임에 최고 각도로 위로 올리기

tail 설정
- 0프레임 위를 향하도록 rotate 조정 키잉 -> 16프레임 키잉
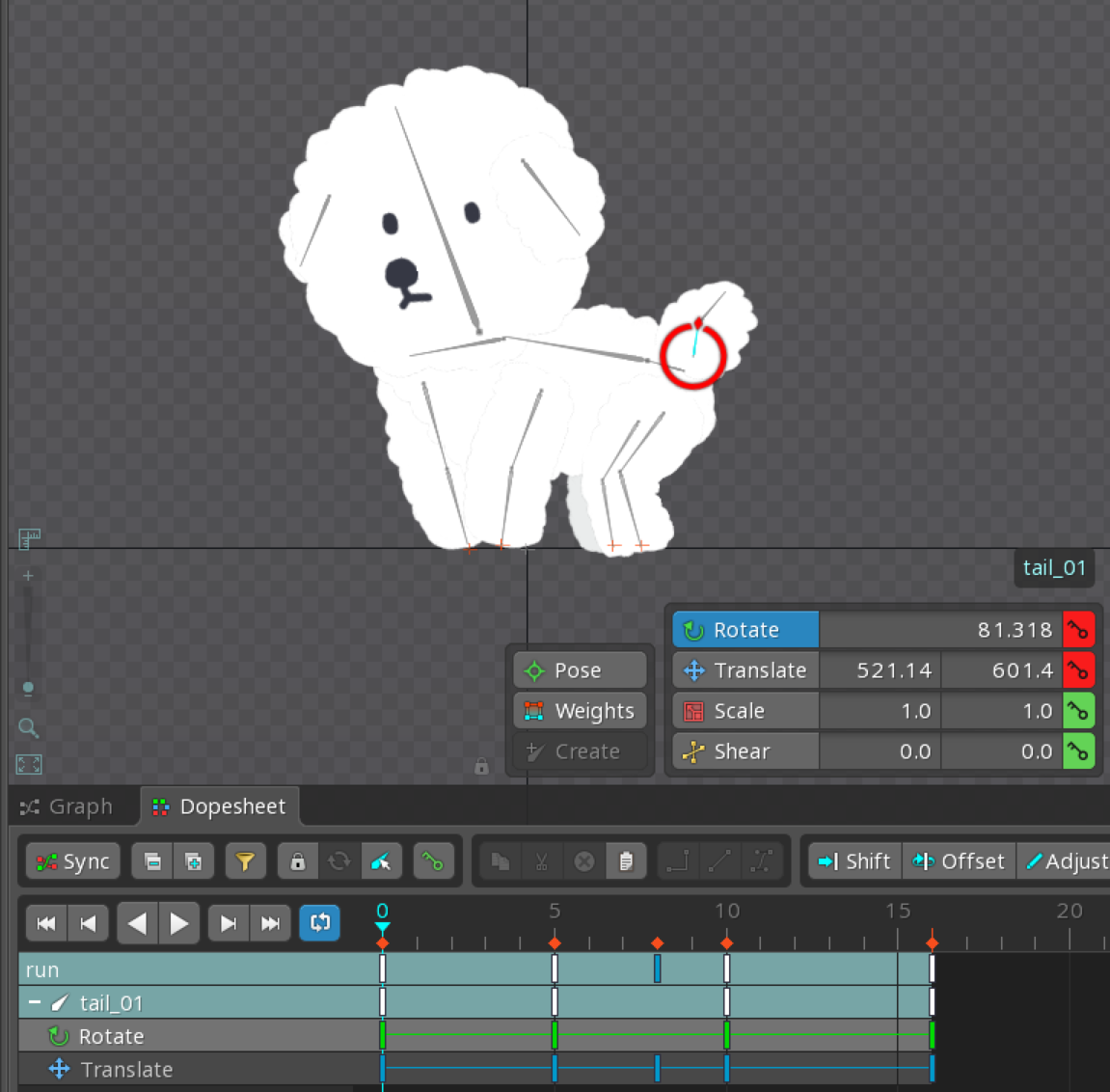
- 5프레임 가장 아래를 향하도록 rotate 조정, pelvis에 가깝도록 translate 조정 키잉
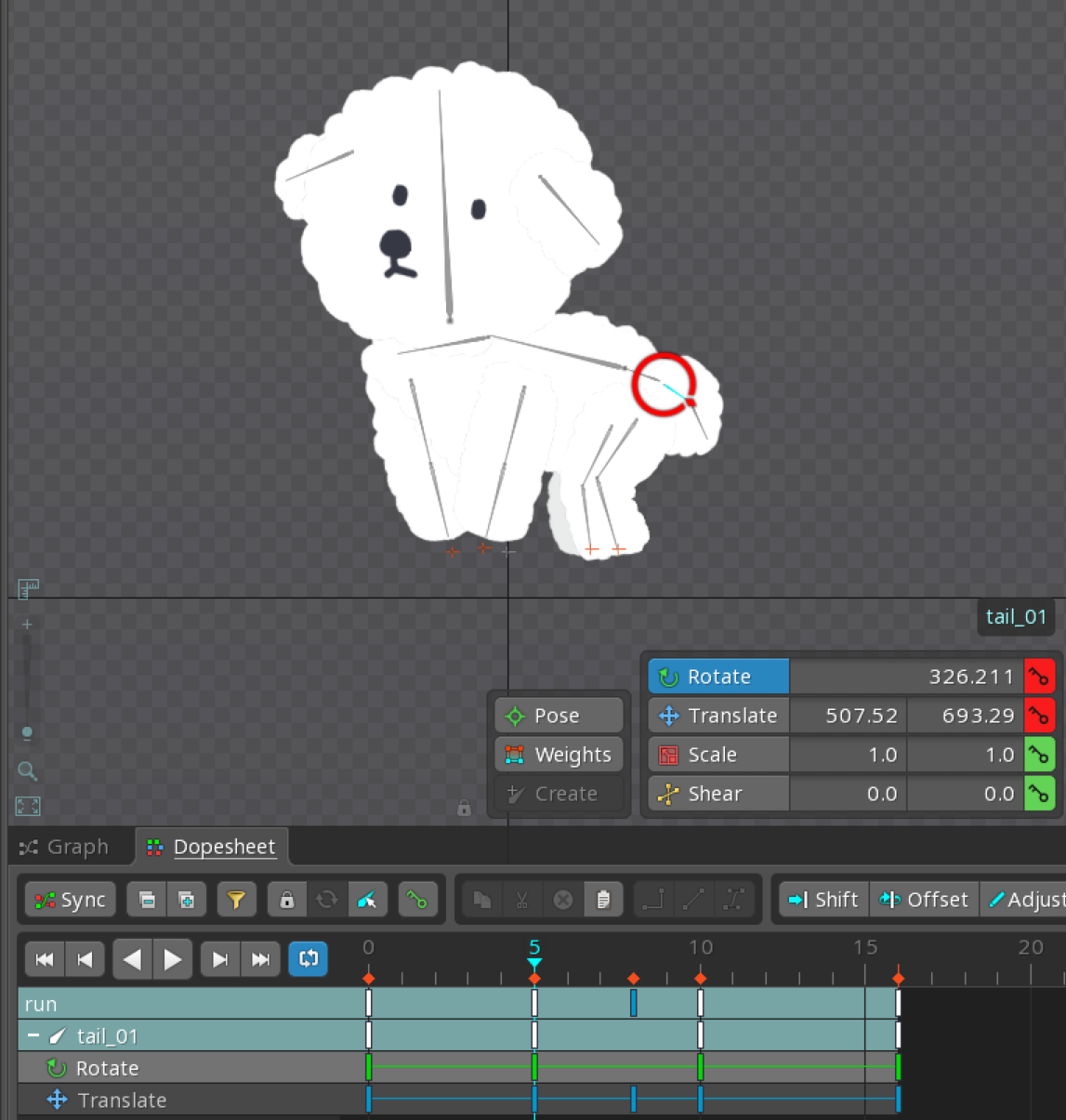
- 8프레임 pelvis에 가깝도록 translate 조정 키잉
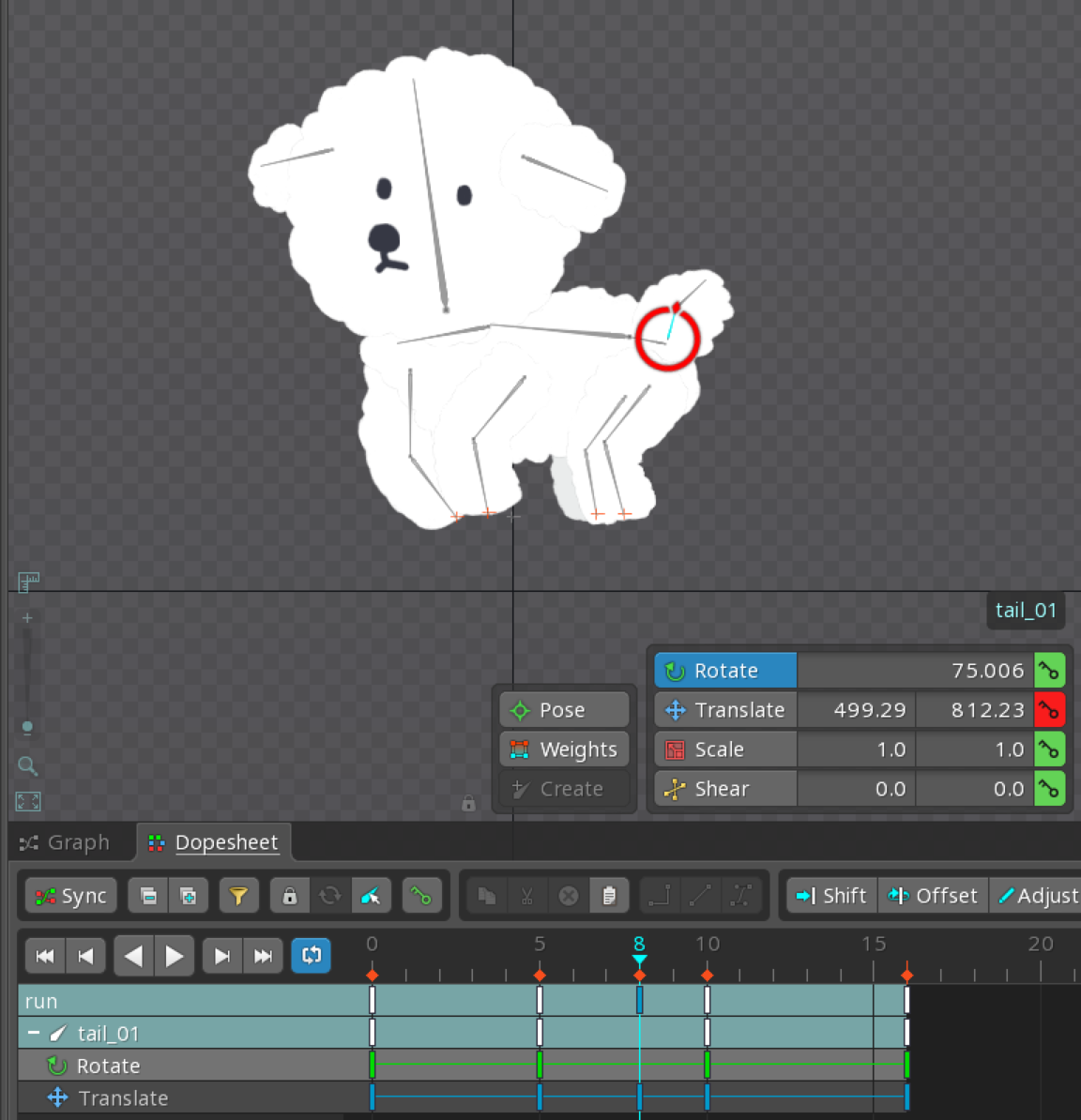
- 10프레임 뒤로 넘어가도록 rotate 조정 키잉

Leg Back 설정
- 3프레임 뒷다리 ik 바닥에 내리
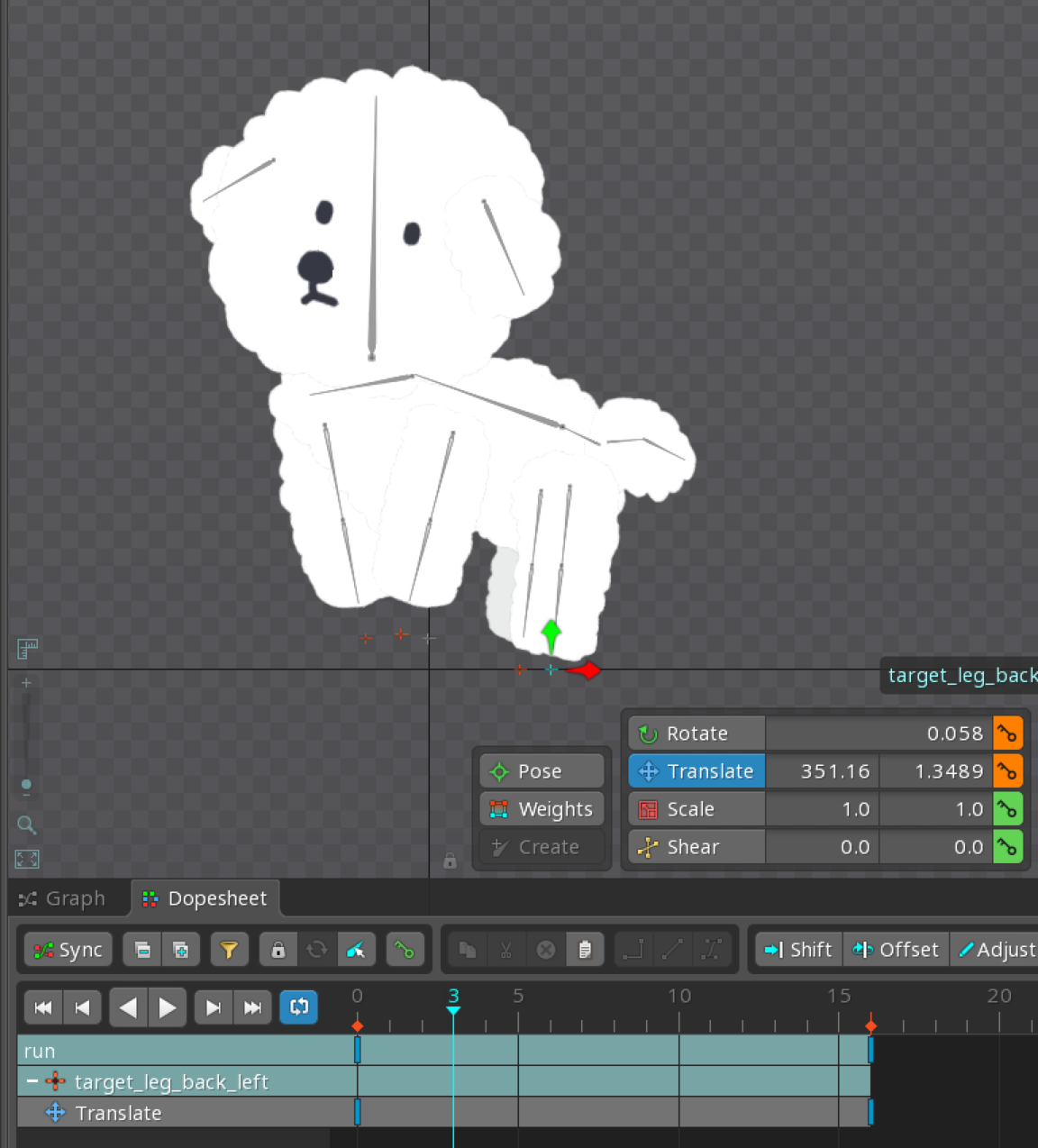
- 3프레임 뒷다리를 살짝 구부릴 정도로 pelvis 내리기

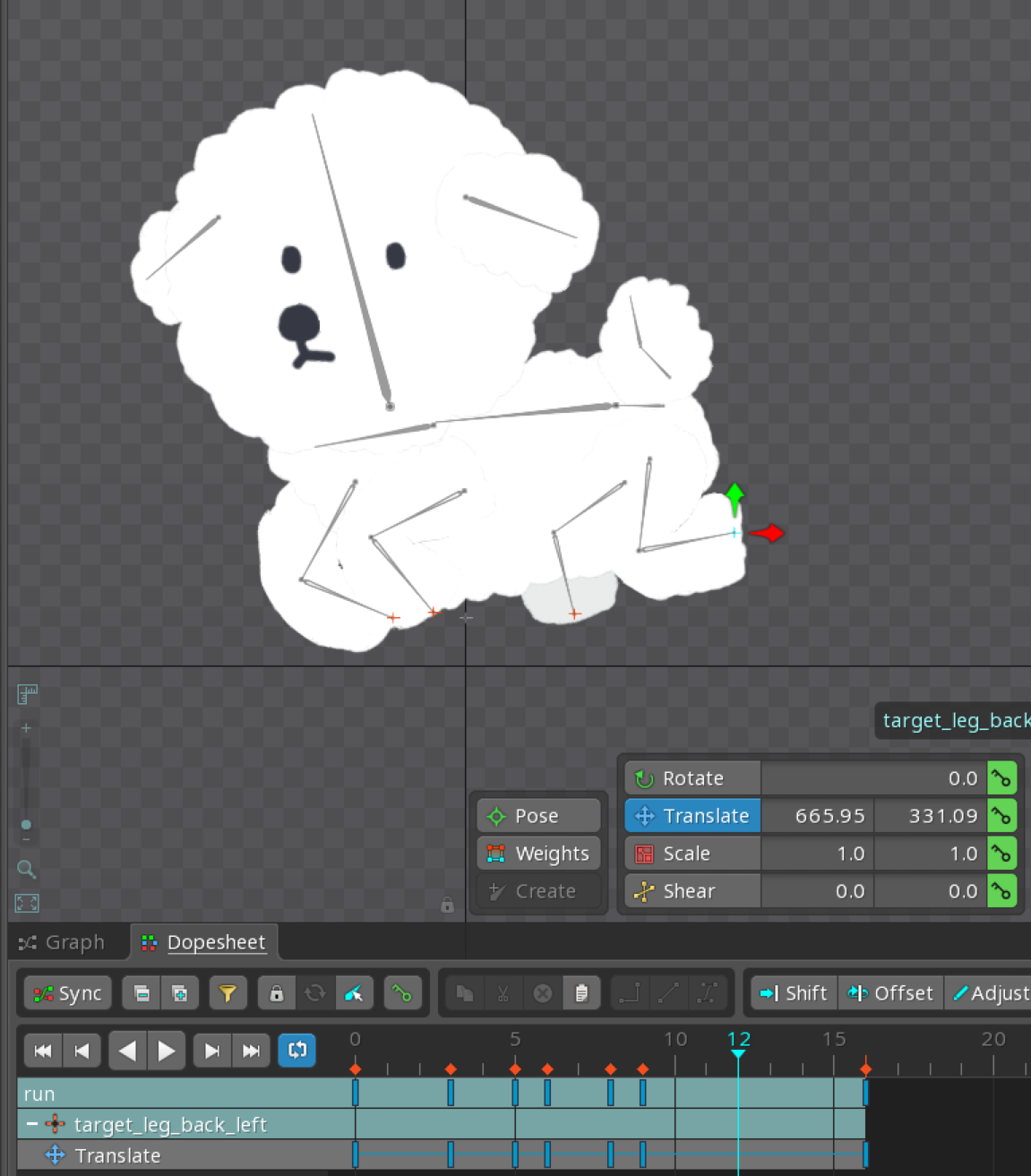
- 왼쪽다리
- 3프레임 왼쪽 다리 IK x축 뒤로 살짝 밀고 tight y축 올리며 다리를 펴는 느낌으로 도약 느낌 내기
- 1프레임의 위치값을 복사 3프레임에 붙여넣기 → 바닥에 내린 후 → x축 이동

- 8프레임 왼쪽 다리 최대 전개로 하늘을 나는 포즈
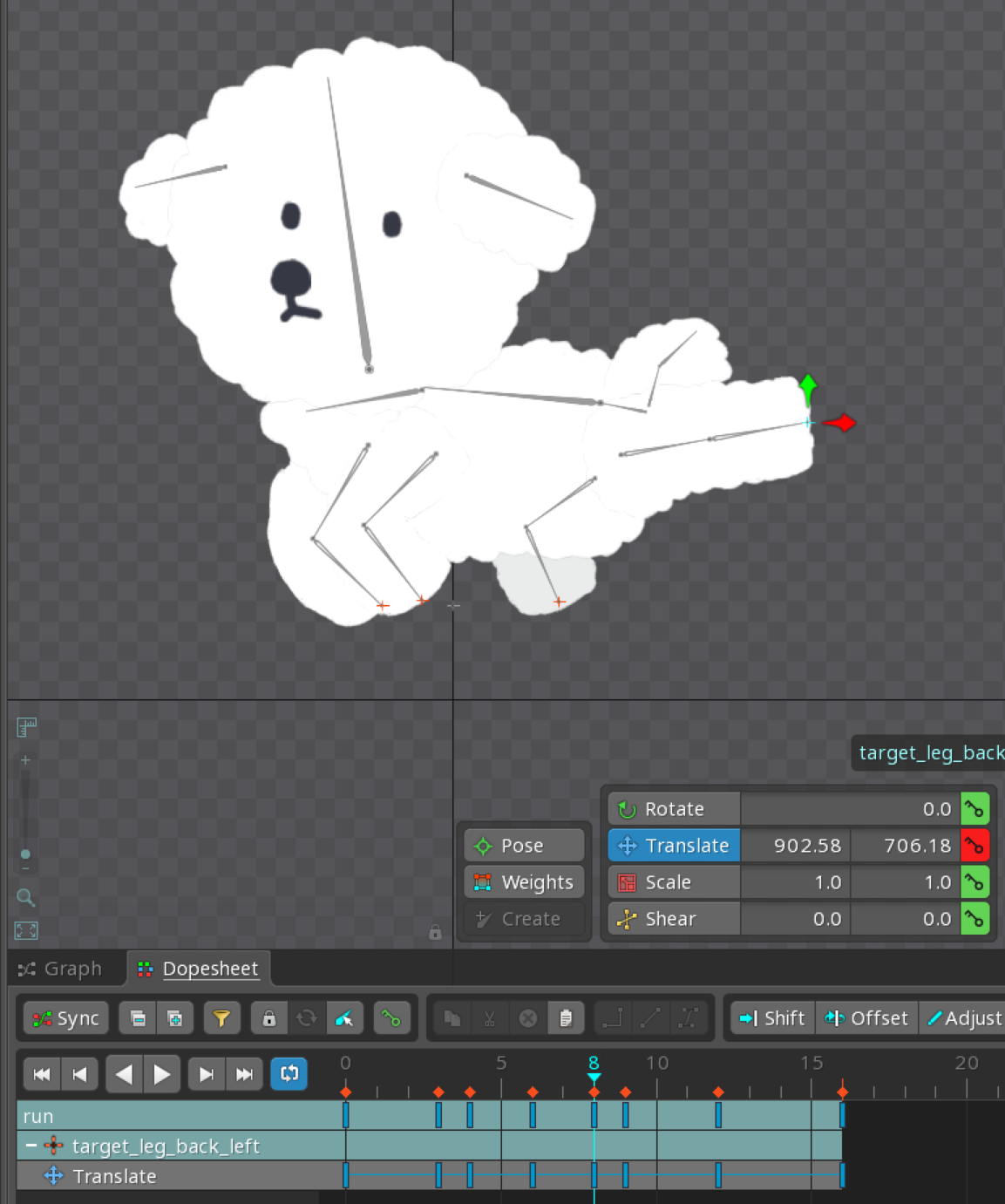
- 중간 5, 6 프레임에 다리 굽히지 않도록 키프레임 작업


- 9프레임에서 8프레임 최대 전개에서 조금 굽혀주기
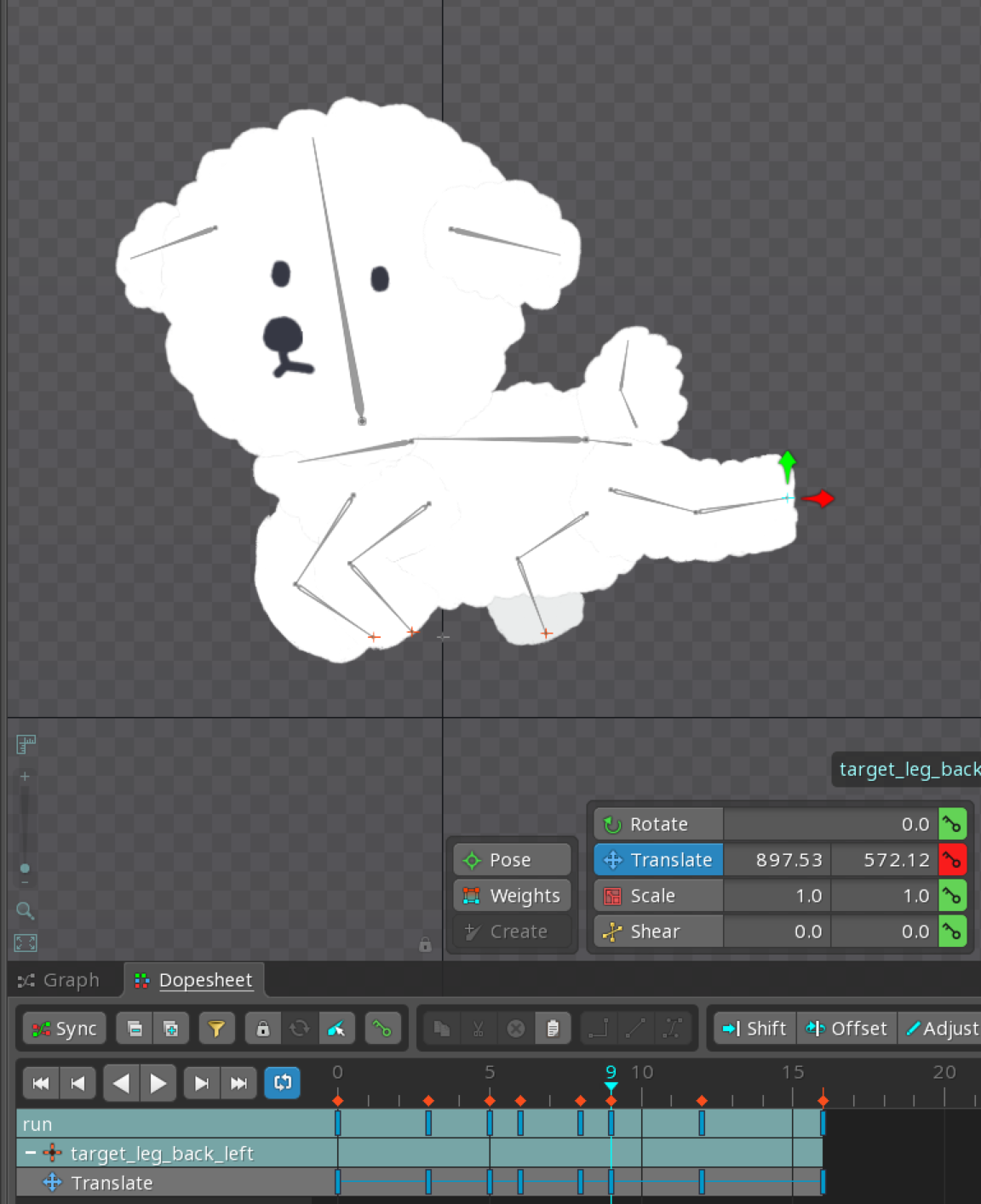
- 12프레임에서 IK 조정으로 다리 조금 밖으로 꺼내주기
- 비포
- 애프터

- 비포
- 3프레임 왼쪽 다리 IK x축 뒤로 살짝 밀고 tight y축 올리며 다리를 펴는 느낌으로 도약 느낌 내기
- 오른쪽 다리
- 2프레임 왼쪽다리 보다 뒤로 보내기
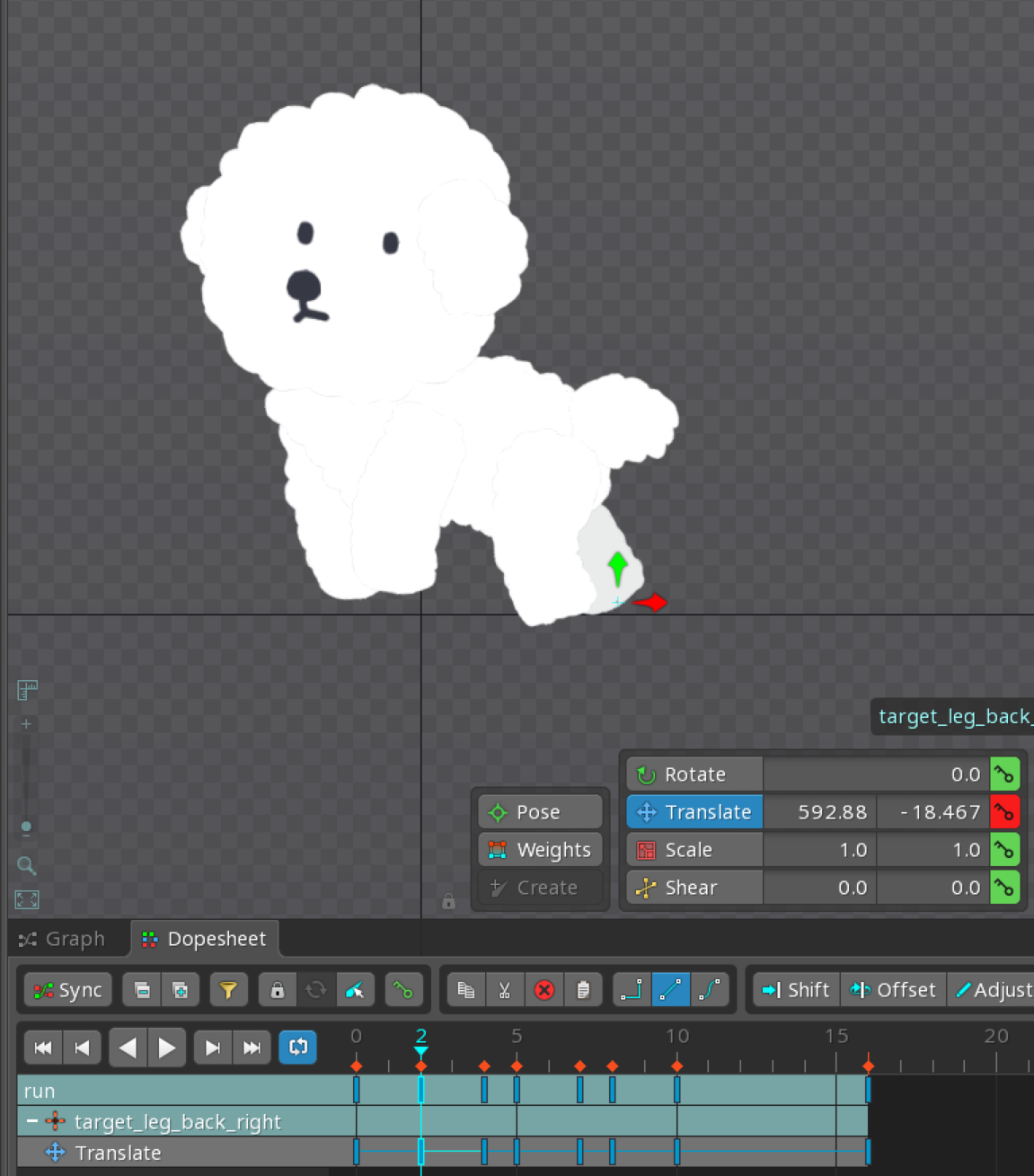
- 7프레임에 최대 전개

- 8프레임에 왼쪽 다리와 크로스

- 4, 5프레임 다리 구부러지지 않도록 조정


- 2프레임 왼쪽다리 보다 뒤로 보내기
Leg Front 설정
- 8프레임에 왼손, 오른손 최대 전개

굽히면서 올라가서 편 상태로 내려오다가 굽히면서 착지하는 동작이 자연스럽다.